

Projects
Cable-suspended robot for additive manufacturing
Some additive manufacturing technologies, like Fused Deposition Modeling or Directed Energy Deposition, may be implemented at a large scale with the use of a cable-suspended robot. The robot’s main function is to control the movement of the material nozzle. For my PhD dissertation, I worked on the design, analysis, and control of such a system.
○ Technical challenges: real-time precision control, multivariable control, disturbance rejection/estimation
□ Tools: MATLAB, Python, Arduino, lab-scale experimentation, Xbox Kinect with computer vision tools
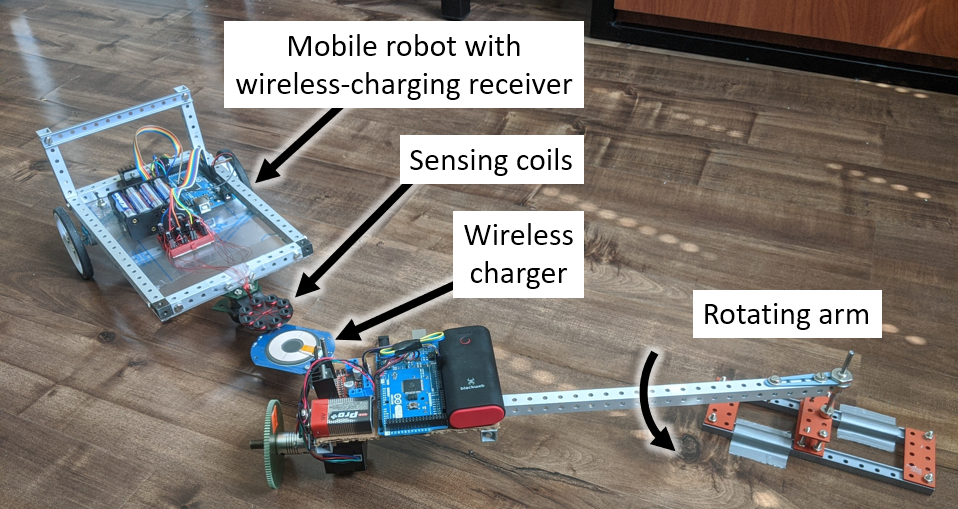
Mobile robot control
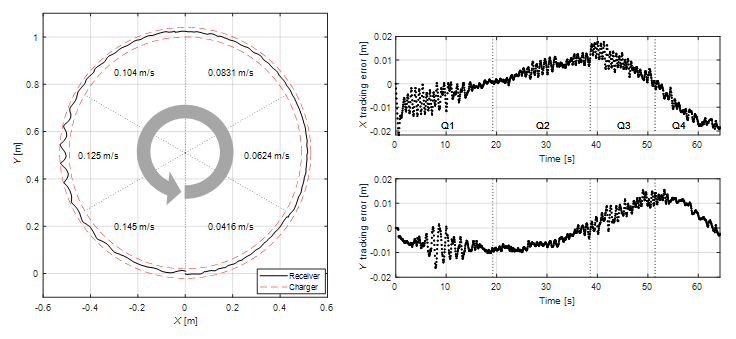
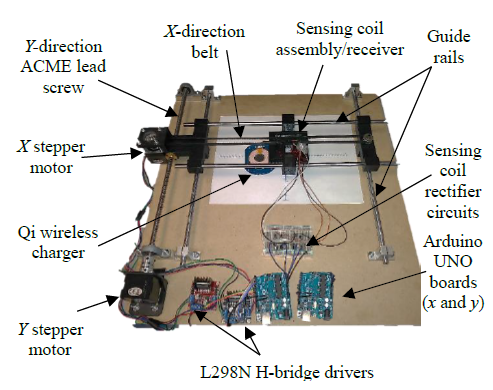
Mobile robots have many practical uses, and they can also be used to test vehicle control strategies. For my M.S. thesis I attached a camera and magnetic field sensor to a mobile robot. These sensors allowed the robot to autonomously approach and position itself above a commercial wireless charger with high precision. The robot stayed aligned with the charger even as the charger moved, allowing for effective wireless power transmission.
○ Technical challenges: mobile robot modeling, vehicle control, sensor design
□ Tools: MATLAB/Simulink, Arduino, Raspberry Pi with camera, computer vision, wireless charger, experimental mobile robot
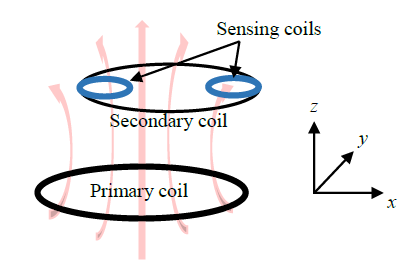
Wireless charging
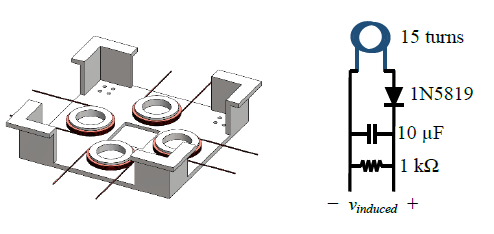
One of the main problems with wireless charging is the loss of efficiency when there is misalignment between the charger and receiving device. I developed and demonstrated the use of magnetic sensors to detect 2-D misalignments in a commercial wireless-charging system.
○ Technical challenges: electromagnetics, sensor design
□ Tools: MATLAB, Arduino, wireless charger

Learning
Dynamics
► Derive equations that accurately describe the behavior of a physical system.
► A physical system may include mechanical, electrical, fluid, or thermal components.
► Models for physical systems can be used to study the system response and/or create control solutions. Models are often studied using computer simulations.
□ Tools: MATLAB/Simulink, Python, C++
Controls
► Create algorithms that can be used to control the behavior of a system—especially in the presence of disturbances.
► Systems may be linear, nonlinear, or multivariable (multiple inputs/outputs).
► Control strategies may be selected experimentally or analytically. Analytical methods may offer mathematical proofs of stability or performance guarantees.
► Many control laws are eventually implemented in a digital form (for example, in the code of a microcontroller).
□ Tools: MATLAB/Simulink, Python, C++, Julia/JuMP (optimization suites), sensor/actuator selection
Design
► Create new concepts that solve engineering problems.
► Generate concepts in a systematic way to meet customer needs. There are endless methods for generating new product ideas. The best method is the one that generates the winning idea.
► Select the materials, sensors, and actuators required for a complete product.
► Clearly communicate design details for manufacturing.
□ Tools: SolidWorks, Creo, AutoCAD, circuit simulators, oscilloscope, multimeter, signal generator, power supply, electrical components, metal and wood machine shop, 3D printing, hand tools
Artificial Intelligence
► Enable an agent (often, a physical system like a robot or autonomous vehicle) to behave as if it is intelligent. The agent appears to make intelligent decisions based on its current environment.
► Related tasks include natural language processing, decision making, learning
Teaching
Dynamics and vibrations
(141 students)
► Assisted students in learning lecture material.
► Helped grade homework, quizzes, and exams.
► Guided students in solving example problems using Matlab and Python.
Systematic design of experimental investigations
(71 students)
► Lead studio sessions where students practice designing, conducting, and reporting engineering experiments.
► Reviewed basic experiment design principles, including statistical analysis and common engineering practices. Students used Excel and Minitab for analysis.
► Provided feedback for effective communication of experiment results in a written and oral format.
Advanced System Dynamics and Controls
(57 students)
► Helped students practice deriving equations of motion for planar and 3D bodies (Newtonian and Lagrangian methods).
► Helped students master topics in classical linear controls. There was also an introduction to state-space methods.
► Developed course projects and solutions in MATLAB/Python. The course project encompassed the design, simulation, and control of an electromechanical system.
Dynamics and Modeling of Mechatronic Systems
(25 students)
► Helped students learn the lumped-parameter analysis of electromechanical systems. Example systems include electric motors, magnetic sensors, magnetic levitation devices, and capacitive devices.
► Analysis methods focus on the application of Maxwell’s equations with relevant simplifications and assumptions.
Introduction to Mechatronics
(75 students)
► Helped students learn the basics of modern mechatronic systems. Topics include sensors, actuators, electrical circuits, integrated circuits, digital logic, microcontroller programming, and controls (linear/discrete).
► Led laboratory sessions for experiments using mechatronic components.
Mechanics of Robotic Manipulators
(41 students)
► Created problem solutions in Matlab and Latex.
► Held regular in-person and virtual office hours to help students understand lecture materials.
► Graded homework, exams, and projects.
